Panela nîv-otomatîk Bender EMBC 1402
taybetmendiyên berhemên
| Na. | Nav | Parametre | Yekbûn |
| 1 | Max.dirêj | 1400 | mm |
| 2 | Max.width | 1400 | mm |
| 3 | Min.Bending length | 200 | mm |
| 4 | Min.firehiya bendkirinê | 260 | mm |
| 5 | Qelindahiya herî zêde (MS), UTS410N/mm²) | 1 | mm |
| 6 | Kêm.qûrahiya bendkirinê (MS,UTS410N/mm²) | 0.5 | mm |
| 7 | Bilindahîya herî bilind | 170 | mm |
| 8 | Moda verastkirina dirêjahiya çapa jorîn Manual | ||
| 9 | Mezaxtina enerjiyê ya navîn | 2.2 | KW |
| 10 | Pîvan | 15 | T |
Taybetmendî û avahiya sereke
Di warê sêwirandin û çêkirina makîneyê de, Hebei Hanzhi CNC Machinery Co., Ltd.bi giranî li ser xalên jêrîn disekine:
1. Têgehek kirrûbirrê ku pratîkbûnê dişopîne û bikarhêner her quruş xilas dike.
2. Têgehek sêwirana pir pêbawer û rast.
3. Materyalên xav-kalîteya bilind, parçeyên kirîn û teknîkên pêvajoyek berbiçav.
4. Zêdetir giranî li ser karanîna hêsan û parastin û ewlehiyê.
5. Rêjeya lêçûna kêm û lêçûna lêçûnê di heman pîşesaziyê de.
çarçove
A. Avakirina modela hêmanên dawî yên 3D: Li ser bingeha modela zexm a 3D ya pêşkeftî û sêwirandî, ji bo hesaban modelek hêmanên dawîn ên dînamîkî tê çêkirin.Model hêmanên sereke yên li ser girêdana veguheztina hêzê dihesibîne.Hêz bi riya girêdanê ve têne veguhestin û paşê analîzkirina hêza hilgirtinê tê kirin.
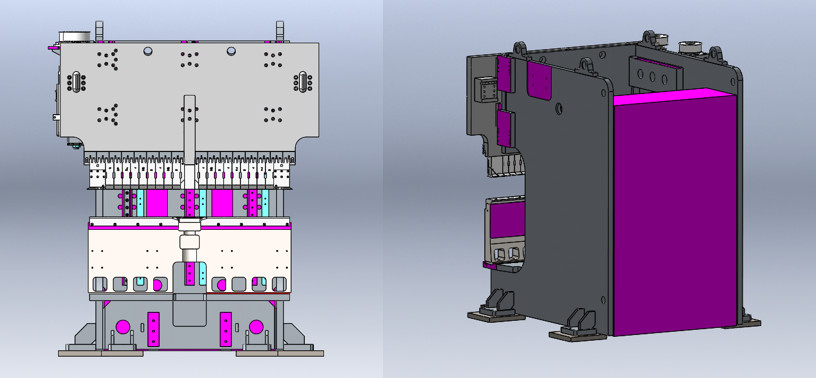
Hêjê 1 Panel bender Modelkirina dînamîk a hêmana dawî ya makîneya tevahî
B. Analîzkirina Encamên Analîza Statîk: Ji ber leza makîneyê hêdî, analîza hêzê dikare bibe pirsgirêkek statîk.Li ser bingeha barkirina pêlavê ya plakê û barkirina barkirinê ya di arasteka vertîkal a serê birrê de, encamên stres û deformasyonê li jêr têne destnîşan kirin.Stresa herî zêde di qirika laş de bi stresek herî zêde 21.2mpa xuya dike û deformasyona herî zêde di dawiya jorîn a laş de bi deformasyona herî zêde 0.30 mm xuya dike.
Li gorî encamên analîza hêmanên bêdawî yên çarçoveyê, pola Q345 wekî materyal hate hilbijartin;welding mertalê karbondîoksîtê hate pejirandin;tedawiya nermkirinê hate kirin da ku zextên ku ji hêla weldingê ve têne hilberandin ji holê rakin;bi vî rengî rastbûn, aramî û hişkiya bilind a amûrê ji bo xebata dirêj-dirêj misoger dike.
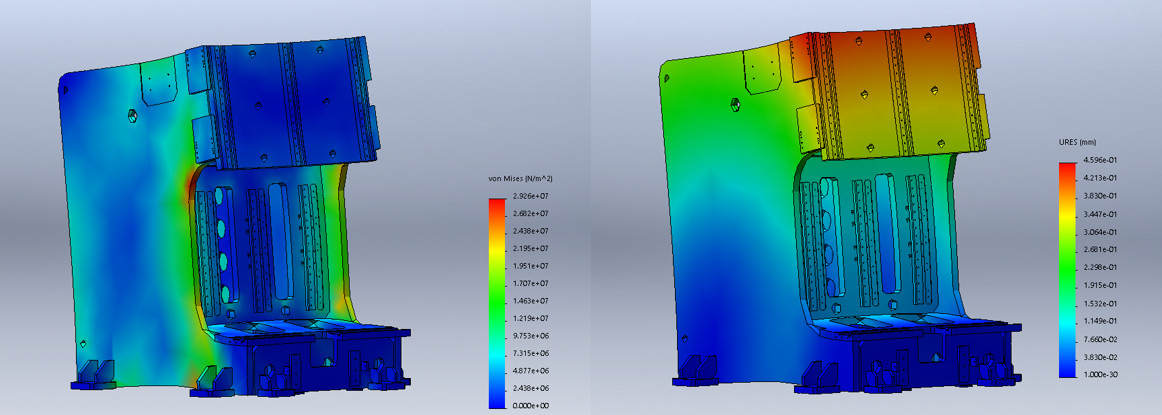
Xiflteya 2 Encamên analîza guheztina guheztina stresê ya çarçoveyê
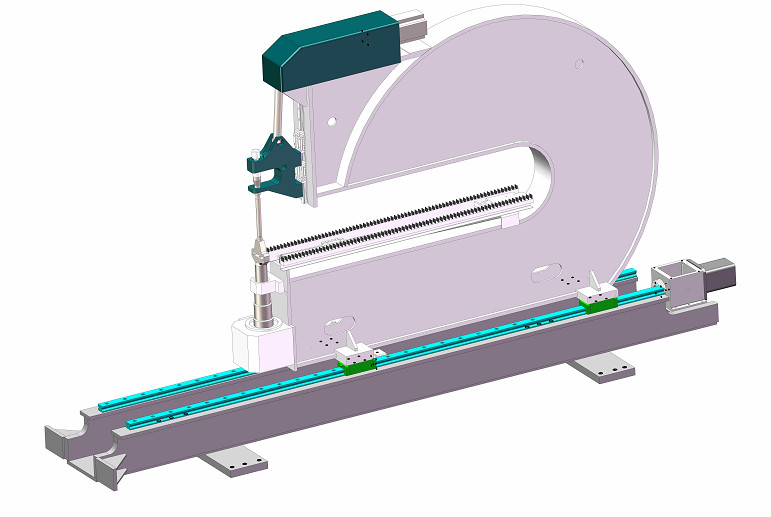
Berê jorîn
Ev beş bi giranî ji slider, pêça torque ya bilind, kêmker, rêça rêber, motora servo û hwd pêk tê.Ajokara sereke ji hêla motora servo ve tê kontrol kirin û moda kontrolê kontrola servo hevdem e, ku dikare bi bandor rastbûna pozîsyonê, leza bilez û kontrolkirina bilind misoger bike.Lubrîkasyona pêça pêşeng û rêça rêber rûnê otomatîkî dipejirîne, û rûn 00 # e, ku jiyana karûbar û rastbûna pêça pêşeng û rêça rêber ji bo xebata demek dirêj misoger dike.
Encamên analîza statîk ên slidera jorîn: nexşeya gurçikê ya jicîhûwarkirina stresê ya tabloya jorîn destnîşan dike ku stresa herî zêde di beşa jorîn de xuya dike, stresa herî zêde 152mpa ye, deformasyona herî zêde di dawiya jorîn a tabloya jor de xuya dike, deformasyona herî zêde 0,15 mm e
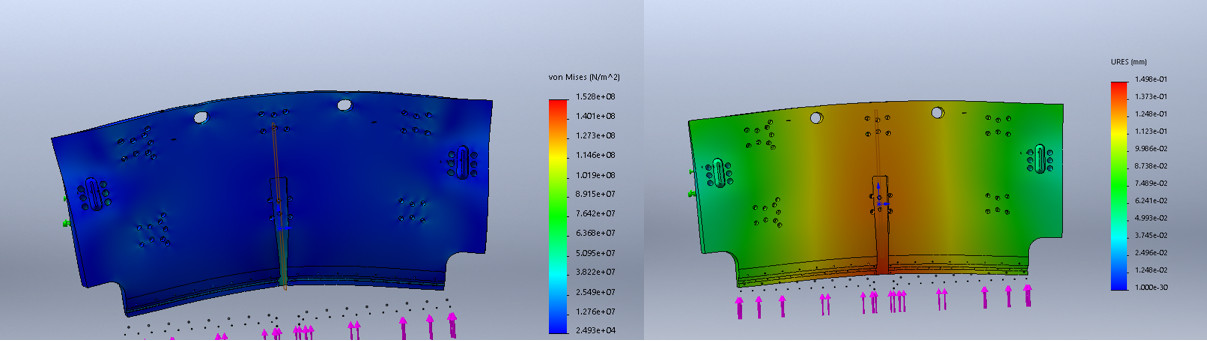
Xiflteya 3 Encamên analîza jicîhûwarkirina stresê ya ram
Li gorî encamên analîza hêmanên bêdawî yên ramê, pola Q345 wekî materyal hate hilbijartin;welding mertalê CO2 hate bikar anîn;tedawiya nermkirinê hate kirin da ku stresa ku ji weldingê çêdibe ji holê rabike;bi vî rengî rastbûn, aramî û hişkiya bilind a amûrê ji bo xebata dirêj-dirêj misoger dike.
Yekîneya bending
Parçeya ajokera hêzê ya yekîneya bendkirinê ji hêla motorek servo ve bêyî tevlêbûna pergalek hîdrolîk ve tê rêve kirin, ku xwedan avantajên mezin e di warê kêmkirina cil û bergên pêkhateyan û karbidestiya veguheztinê de, li gorî teserûfa enerjiyê û siyaseta parastina jîngehê ya ku tê parêz kirin. ji aliyê dewletê ve.
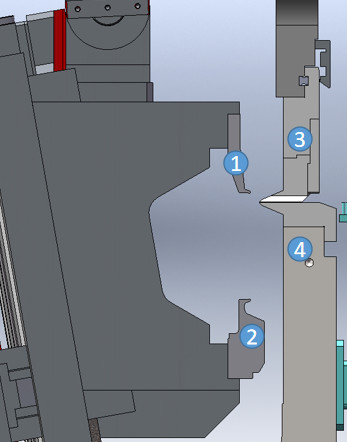
Li gorî mîhenga agahdariya pelê, pergal bixweber pozîsyona kêrê çapa jorîn 3 dihejmêre û dûrahiya di navbera kêra çapa jorîn 3 û kêra çapa jêrîn 4 de kontrol dike da ku pelê rast bike;li gorî mîhenga pergalê, gelo ev çîçek jor be an berjêr be, kêra çapê ya jêrîn 2 an kêra çapê ya jorîn 1 tê kontrol kirin da ku bi lez berbi pozîsyona kêşanê ve biçe;li gorî qonaxên cîhêreng ên mîhengê, kêrê bendkirinê tê kontrol kirin da ku bi formula hesabkirina goşeya patented ve berbi pozîsyona hesabkirî ve biçe da ku qulikê temam bike.
Li gorî awayên cûrbecûr guheztinê, meriv dikare li quncikandina goşeyê, guheztina kemera mezin, çîçeka dakêşan, û hwd were dabeş kirin.
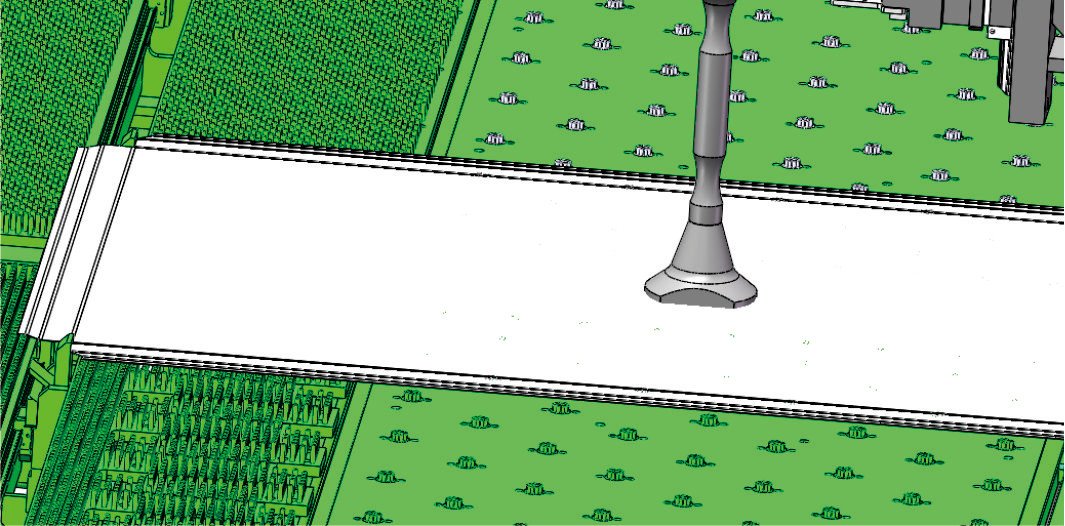
Yekîneya çapemeniyê ya jorîn
Fig.6 Yekîneya çapa jorîn
Yekîneya çapa jorîn: parçeyek ji hemî pêvajoyên guheztinê, navenda qutkirina piralî ya servo ya tevahî ya EmbC bi yekîneyek çapa jorîn a taybetî ya ku dikare ji bo dirêjiyên cihêreng ên plakaya were saz kirin û bi destan were saz kirin heye.
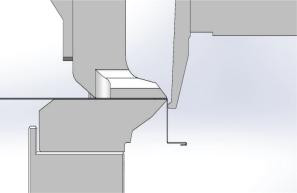
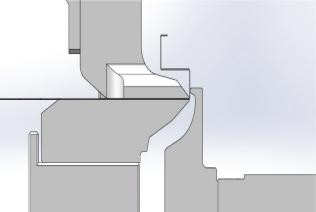
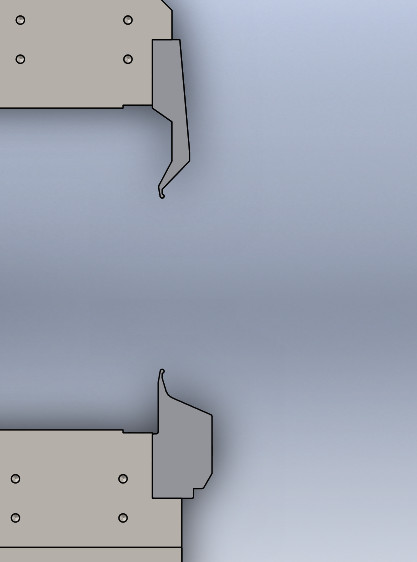
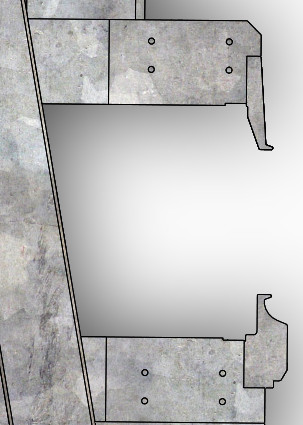
Ji bo ku em hewcedariyên qutiya qutkirina dûrketinê bi cih bînin, me mirinek taybetî ya dûrgirtinê pêşxistiye.Berî zextê, beşek ji mirina dûrketinê di rewşekê de ye berî ku di diagramê de were tikandin û xwarin dest pê dike.Piştî xwarinê, ew di rewşekê de ye, piştî ku di diagramê de bitikîne û qulbûn dest pê dike.Piştî hilkişînê, slidera jorîn dimeşe.Di dema tevgera slidera jorîn de, beşa A dê bixweber berê xwe bide rewşa berê.Piştî ku slidera jorîn çû cîhê sazkirî, tevgera din dest pê dike.
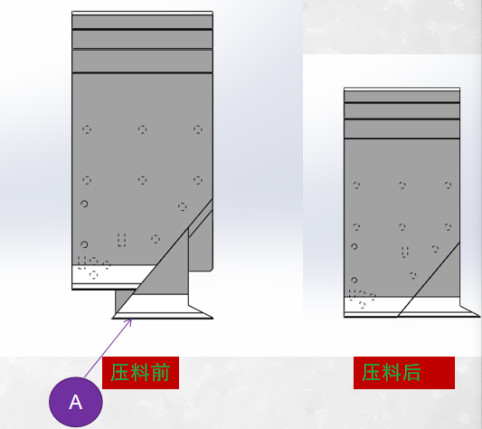
Hêjîr.7 Xweparastina qutiya berbendkirinê
Hacet
Amûrên çeqandinê li ser amûrên qijkirinê yên jorîn û amûrên qijkirinê yên jêrîn têne dabeş kirin.Amûrên qutkirinê yên taybetî dikarin li gorî hewcedariyên cihêreng ên xerîdar werin xweş kirin.
2. Yekîneya xwarinê Plate:
Tevger, girtin û zivirandina pelê metalê bi rêzê ji hêla robot 1, pêvek 2 û dîska zivirî 3 ve têne kontrol kirin.Di tevahiya pêvajoya makîneyê de, xwarina pelê ji hêla motorên servo ve tê kontrol kirin, otomasyon û pozîsyona bilez çêdike, demên tevgerê kêm dike û karbidestiyê zêde dike.Bi saya nûbûnên avahîsaziyê û sepana kontrola servo ya bêkêmasî, girêdan û zivirîna pelê metalê dikare li seranserê pêvajoya xebata navenda guheztina piralî rastbûnê biparêze.Ji bo gelek perçeyên xebatê yên tevlihev, tewra yên pirgonal jî, rastbûna zivirîna domdar a 0,001 dikare were garantî kirin.
3. Yekîneya pozîsyona plakaya:
Yekîneya pozîsyona plakaya ji pinek çepê, pişkek pozîsyona rast, pişkek pozîsyona pêşîn û pişkek pozîsyona paşîn pêk tê;pîneyên pozîsyona çep û rast plakaya çep û rastê digirin.Pîneya pozîsyona pêşîn û pîneya pozîsyona paşîn pozîsyona pêş û paşîn a plakê kontrol dikin û piştrast dikin ku plak bi kêrên çapê yên jorîn û jêrîn re paralel e, ku ji bo misogerkirina rastbûna cîhê plakê tê bikar anîn.
Yekîneya pozîsyona plakê dikare bixweber pêlê bi cîh bike û bixweber guheztina piralî di yek carî de temam bike, ku dema çerxa çîqê pir kurt dike, xeletiya qutkirina plakê di qulika yekem de kontrol dike û rastbûna kêşanê piştrast dike.
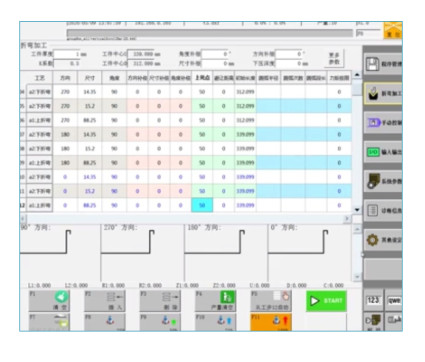
4.Pergala CNC
A: Pergal û nermalava CNC ya bi hev re pêşkeftî dikare zû û bi hêsanî were sepandin û rêvebirin
B: Taybetmendiyên sereke.
a) .Rêbaza kontrolkirina otobusê EtherCAT bi berxwedana destwerdana bilind
b) Bernamesaziya rasterast piştgirî dike, daneyên guheztinê ji bo her gavê dikarin di formê de têkevin
c) Piştgiriya ji bo kişandina çolê
d) Kontrola servo ya bi tevahî elektrîkî
e) Piştgiriya ji bo tezmînata bendkirinê
f) Piştgiriya bernameya du-alî
Fonksiyona bernamesaziya 2D, daneyên xêzkirina 2D DXF derdixe, bixweber pêvajoya guheztinê, mezinahiya guheztinê, goşeya zivirandinê, goşeya zivirandinê û daneyên din diafirîne.Piştî pejirandinê, pêvajoyek guheztina otomatîkî dikare were kirin
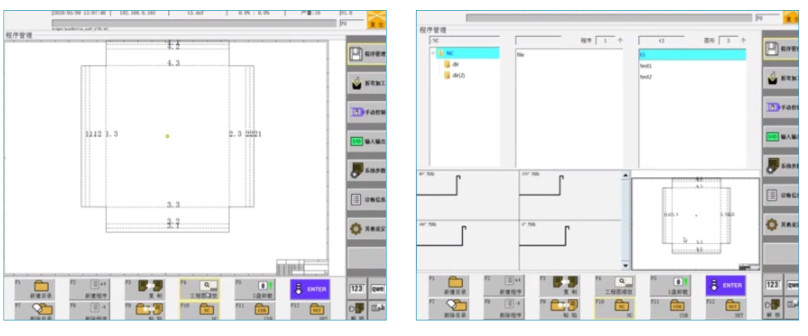
Lîsteya beşa sereke
| Na. | Nav | Nîşan |
| 1 | Çarçove | Rîsipîti |
| 2 | Hacet | Rîsipîti |
| 3 | Yekîneya bending | Rîsipîti |
| 4 | Pergala CNC | Rîsipîti |
| 5 | Servo motor | Rîsipîti |
| 6 | Servo driver | Rîsipîti |
| 7 | Hesinê tirêne | Rîsipîti |
| 8 | Ballscrew | Rîsipîti |
| 9 | Reducer | Taiwan |
| 10 | Breaker | Schneider |
| 11 | Pişkov | Schneider |
| 12 | Beşê elektrîkê | Schneider |
| 13 | Kablo | Yicu |
| 14 | Guhestina nêzîkbûnê | Omron |
| 15 | Bîlye | SKF/NSK/NAICH |
4) Sêwirandin, çêkirin, kontrolkirin û sazkirina amûra makîneyê standardên jêrîn bicîh tîne.
1, GB17120-1997
2 Q/321088JWB19-2012
3, GB14349-2011
Parçeyên yedek û navnîşa amûran
| Na. | Nav | Qt. | Bingotin |
| 1 | Tool box | 1 | |
| 2 | Padek saz bikin | 8 | |
| 3 | Inner spanner hexagon | 1 set | |
| 4 | Manual fueling gun | 1 | |
| 5 | Destûra pergala CNC | 1 | |
| 6 | spanner vekirî | 1 |





